[배경]
과실 생산 과정에서 제어 기술이 접목된 자동화 기계시스템은 이식, 접목, 작물의 관리, 수확 등의 정밀함이 요구되는 반복 작업임
작물 수확용 과실 수확 로봇은 과실의 특성상 손상의 위험이 크기 때문에 정교한 제어 기술이 요구됨
현재 대부분 과수원은 수확을 수작업으로 진행됨
과실의 익은 정도를 판별하는 시스템은 과수원 농업과 IOT 융합 기술과 같은 새로운 기술을 접목시켜 많은 수요가 예상됨
2022년을 기준으로 총 9,400톤을 생산하여 약 220억원의 매출을 나타내고 있음
◎ 해외 수출량 : 약 980톤, 국내 수입량 : 8,500톤
발생이유 및 대안
◎ 사과 재배농가에서 수작업으로 인한 인건비의 증가
◎ 재배환경에 적합한 기계화 및 자동화가 필요함
[목적]
농가의 문제점 해결방안으로 무선조종 과실판별로봇의 개발이 요구됨
본 연구 기반, 각종 과실특성 파악 및 적합한 시스템 구축을 통한 다양한 농가 보급 가능
과실판별로봇 개발을 통해 스마트 농장으로의 영역 확장 가능
테스트베드 구축
◎ 정상과실 및 질병과실을 표현한 테스트용 과수원 환경 조성
◎ 이동경로에 과실보관상자 등의 장애 요소를 고려한 장애물 설치
◎ 모의 과수원 환경을 조성한 테스트베드 주행 목표
SLAM 기법 기반의 맵핑 알고리즘 구현
◎ 라이다(Lidar)센서, AHRS모듈의 위치데이터 기반 로봇의 현재 위치 및 주변 환경 추정기술
◎ 테스트베드 경로 데이터 수집 및 자율주행이 가능한 시스템 구성
- 현재 SLAM기반의 맵핑을 통한 자율주행 시스템은 구현됨
- 정상과실과 질병과실의 확인 및 구분의 기능은 진행중임
◎ 딥러닝을 통한 학습을 위한 테스트과정 진행중
- 실제 과수원 및 농가의 환경을 고려한 제품 제작
◎ 과수원 및 농가에 적용하기에는 모터의 사양 및 센서의 성능이 부족한 실정임
◎ 제한된 재료비내에서 구현하는데에는 어려움이 존재함
◎ 실제 운영중인 과수원 섭외 및 현장 테스트를 목표로 추가 프로젝트 추진 및 진행 예정
- 각종 과실의 특성을 조사하고, 적합한 시스템을 구축하여 다양한 농가에 보급한다면 해외 수입 과실과의 가격 경쟁력 확보가 가능할 것으로 기대됨
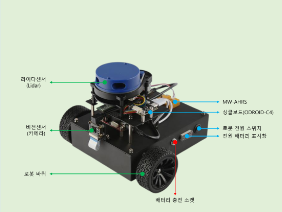
과실판별로봇.png (32.1 KB)

테스트베드 구축.png (58.6 KB)